Mosfet ve igbt gibi anahtarlama elemanlarının yüksek frekansla çalıştırdığımız zaman, anahtarlama işlemlerini, açılıp kapanma işlemlerini olabildiğince hızlı yapabilmek zorundalardır. Kimi zaman bu hızı artırma amacı ile kimi zaman PWM sinyalinin gate ucuna daha temiz ve düzgün gelmesi amacı ile çeşitli sürme teknikleri uygulanmaktadır.
Mosfeti yeterince hızlı sürebilmek için, GS uçları arasına mosfeti saturasyona sokacak miktarda voltaj uygulamamız gerekmektedir ve ayrıca, hızlı bir şekilde deşarj edebilmek için de entegreye doğru olan direnç miktarını da düşürmek zorundayız. Gate ucu kapasitansa sahip olduğu için, mosfeti bir kapasitör gibi düşünüp, kapasitörü şarj edip deşarj ettiğimizi söylesek yanlış olmayacaktır. Gate direnci mosfetin açılıp kapanma hızını belirleyen bir faktör olduğu için 27 ohm dan büyük direnç kullanılması önerilmemektedir. Büyük gate direnci kullanımı, anahtarlama kayıplarını artırır ve bunun yanında osilasyonlara sebebiyet verebilmektedir.
Igbt lerde gate ucuna sahip olup, mosfetlerle aynı gate karakteristiğini barındırdıkları için, tüm mosfet sürme yöntemleri igbt ler içinde kullanılabilmektedir.
Ground Referanslı Gate Sürme Teknikleri
Bu başlık altında anlatılacak olan tekniklerde, mosfetin source bacağı ile PWM yada driver entegresinin referans noktası aynı nokta olmaktadır.
1) PWM Direct Drive (Direkt Sürme)
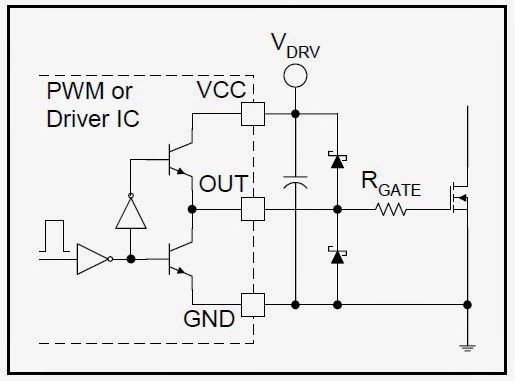
Push pull tarzı bir topoloji dizayn etmemiz gerekmediğinde, tek çıkıştan tek mosfet sürmemiz gerektiğinde ve yer, fiyat açısından tasarrufa gitmeyi amaçlıyorsak direkt sürme tekniği kullanılabilir. Aşağıdaki resimde bu örneği görebilirsiniz.

Burada yer alan GND ucu ile mosfet source bacağı arasındaki mesafe parazitik endüktansın değerinde önemli bi rol oynamaktadır. Bu parazitik endüktans, out pininden gate ucuna ve oradan gnd ucuna gelen bir döngünün içinde yer alır ve gnd ile gate arasındaki mesafe anahtarlama hızını düşürerek, gate sinyalinde ringing dediğimiz osilasyonlara sebebiyet verebilmektedir. Bu endüktansı azaltmak için daha geniş PCB yolları kullanılabilir. Diğer bi sorun ise, PWM entegresinin akım sınırının düşük olabilmesidir. Bu da gate kapasitansının çekeceği akımı kaldıramayabileceği anlamına gelmektedir. Ayrıca, bu akım entegreye göre yüksek olabildiği için, entegre içinde güç harcaması yüksek olur ve entegrenin ısınması anlamına da gelebilir. Ani çekilen gate akımı ile birlikte entegre çıkışında current spike dediğimiz, akım sıçramaları meydana gelip entegreye hasar verebilir.
Buradaki, VCC ile GND arasındaki kapasitör bypass kapasitörüdür ve mosfetin on olduğu durumda çekilecek ani akımı sağlamaktadır. Bu kapasitörün değeri aşağıdaki denklemler aracılığı ile bulunabilir. Bu kapasitör olmadığı durumda ise, ani çekilen akım ile birlikte VCC voltajıda ani olarak düşebilir. Güç sabit olduğu için, düşen voltajla birlikte, ani yükselen akım meydana gelip entegreye hasar verebilir. Bu kapasitör, ani çekilen, mosfetin on olduğu durumdaki akımda, VCC voltajını sabitleyerek akımıda sabitlemiş olmaktadır. Böylece, voltajda düşme olmadığı gibi, akımda da yükselme engellenebilmektedir.
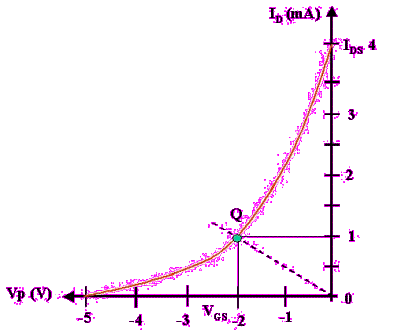
I akımı burda, çıkış on olduğu durumda, PWM entegresinin yada driver entegresinin I source High akımı olarak geçebilir. Buradaki I akımını datasheetden bakıp en küçük akımı alabilirsiniz. Dmax ise, çıkışların max on olduğu durumdaki duty cycle oranıdır. fdrv ise, PWM entegresinin yada driver entegresinin o çıkıştaki frekansıdır. Yani anahtarlama frekansıdır diyebiliriz. Qg ise toplam gate şarjıdır ve mosfetin datashetinden öğrenilebilir. Bu değer, gate voltaj genliğine ve mosfet off durumundaki drain – source voltajına bağlıdır. Genelde Qg değeri, grafik üzerinden gösterilmektedir. Delta V ise, bypass kapasitörü üzerindeki ripple voltajıdır. Delta V değerini yüksek bi değer olmadıkça kendiniz bi değer girebilirsiniz. Hesaplamak istemiyorsanız, genelde kullanılan değerler olan 0.1uF ile 1uF kullanabilirsiniz. Hiç kullanmamaktan iyidir fakat denkleme göre seçeceğiniz kadar iyi olmayacağını aklınızda bulundurmalısınız.
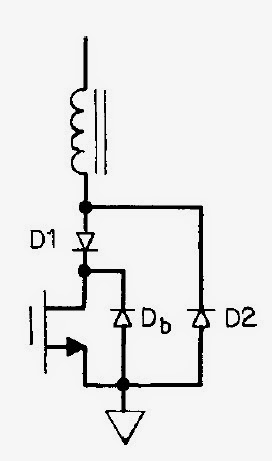
Dikkat etmemiz gereken diğer bi husus ise, çıkışında bipolar transistörleri olan PWM ve driver entegrelerinde, direkt sürme tekniği uygulamasında, çıkıştaki bipolar transistörleri ters akıma karşı korumak için, uygun koruma önlemleri alınmalıdır. Bunun için çıkışa şekildeki gibi hızlı diyotlar bağlanmalıdır. Çıkıştaki NPN transistörleri akımı tek yönde sağlayabilmektedir. High side NPN, yukardaki NPN, low side olan aşağıdaki NPN off durumunda olduğunda, on olacaktır. GND ile mosfet source bacağı arasındaki istenmeyen parazitik endüktanslar ise, akımın çift yönde ileri geri dolaşabilmesine olanak sağlayabilmektedir. Bu yüzden bu ters akımları yönlendirecek bir yol belirlenmelidir, Bunun için hızlı diyotlar şekildeki gibi bağlanmaktadır. Bu diyotlar ve bypass kapasitörü çıkışa olabildiğince yakın olmalıdır.
2) Bipolar Totem Pole Sürme Tekniği
En popüler sürme tekniklerinden biri olan bipolar totem pole non-inverting sürme tekniği aşağıda gösterilmiştir. Non-inverting, out kısmında nasıl bir sinyal varsa, faz farkı olmadan gate ucuna aynen aktarması demektir. Bu sürme tekniği ise, akım sıçramalarına dayanabilmektedir.
Bu teknikte, ani akım sıçramalarının dolaştığı döngü daha küçük olduğu için, parazitik endüktans da daha küçük olmaktadır. Fakat, bu teknik ekstradan bypass kapasitörü içermektedir ve bu da yukardaki resimdeki gibi bağlanmalıdır. R ise burada, gürültüyü azaltmak için kullanılan dirençtir. Kimi kaynaklarda ufak bir endüktans değerinin de iş göreceği yazmaktadır. Rgate direnci ise opsiyoneldir kullanıcıya bağlıdır fakat Rb direnci, gereken gate empedansına ve NPN, PNP transistörlerinin hfe değerine bağlıdır.
Bu tekniğin avantajlarından biri, iki bipolar transistörünün, ters gerilim veya akımdan dolayı birbirini korumasıdır. Parazitik döngü alanı çok küçülebildiği için, Rgate direnci yok sayılabilmektedir. Ayrıca gate voltajını, Vbias + Vbe ve GND – Vbe ye limitlemektedir ve hızlı diyot kullanımı gerekmemektedir. Diğer bi avantaj ise, entegrenin yeterli gate akımını sağlayamadığı durumlarda kullanılabilmektedir. Aldığım kaynakta yazmasa da, başka bi yerde okuduğum kadarı ile yüksek frekanslı devrelerde bipolar teknikleri önerilmemektedir. Ne kadar yüksek frekanslarda olduğunu ise henüz bilemiyorum.
3) Mosfet Totem Pole Sürme Tekniği
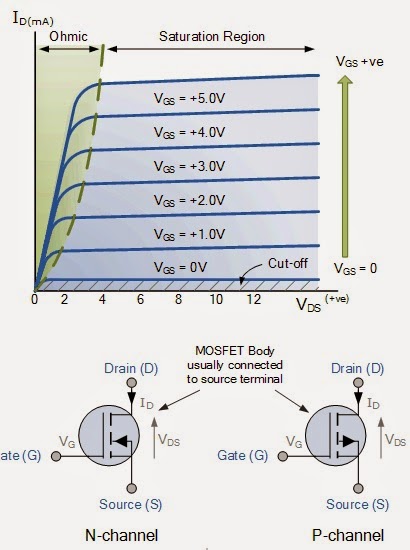
Bu teknik, bipolar tekniğinin mosfetlerle yapılmış versiyonudur diyebiliriz. Bipolardak NPN, PNP çifti gibi, burda da P channel ve N channel mosfetler kullanılmıştır. Bipolardaki tüm avantajlar bu teknikte de mevcuttur fakat, bu teknik bir kaç dezavantaja sabittir ki buda bu teknikiğin neden daha az kullanıldığını açıklamaktadır. Bu teknikte, out kısmındaki sinyal gate ucuna ters olarak geldiği için, mosfetlerden önce out sinyalinin tersi alınması gerekmektedir. Diğer dezavantaj ise, mosfetler totem pole için kullanılacak bipolar transistörlerden daha pahalıdır. Mosfetlerin iç dirençleri daha düşük olduğu için, Vbias kaynağından daha fazla akım çekmektedirler. O yüzden Rgate direnci burda önemli olabilmektedir. Bunu azaltmak için zamanlama devreleri ve ilave logic devreleri kullanılabildiği söylenmektedir.
4) Hız Artırma Teknikleri
Mosfetin anahtarlama hızını artırmak için çeşitli devreler kullanılmak zorundadır. Bu devreler, gate ucunun daha hızlı deşarj olmasını sağlayarak, gate voltajının daha hızlı düşmesini böylece mosfetin daha hızlı kapanmasını sağlamaktadırlar. Mosfetin turn on hızı yani on olabilmesi açılabilmesi için gereken hız, genelde, turn off hızına ve doğrultma için kullanılan diyotların reverse recovery speed hızına bağlıdır. Daha hızlı anahtarlama, anahtarlama kayıplarını azaltabilir fakat turn off hızı artıran devreler osilasyonlara yol açabilmektedir çünkü di/dt ve dv/dt turn off oranları da artabilmektedir.
a) Diode Turn Off Devresi
Aşağıda görebileceğiniz üzere mosfetin off zamanı, gate direncine paralel olarak şekildeki gibi yerleştirilen hızlı diyotla azaltılmıştır. Burada off zamanı, diyotun reverse recovery speed yani ters toparlanma hızına bağlıdır. Optimum dizaynda, turn on hızı, diyotun anahtarlama karakteristiği ile uyumlu olmalıdır.
Burada turn on hızı Rgate direnci ile sağlanmaktadır. Turn off sırasında ise, gate akımı ise aşağıdaki formülün değerinden büyük olduğu durumunda, diyot aktif hale gelmektedir.
Burada, Vd,fwd diyotun forward voltage değeri olarak geçmektedir. Diyot on olduğu durumda, üstünden akım geçirdiği zaman ki üzerinde oluşan voltajdır. Rgate ise gate direncidir. Ig ise, gate akımıdır. Resimde görüldüğü üzere, akım dirençle karşılaşmayacağı için, gate kapasitansı daha hızlı deşarj olabilmektedir. Dezavantajı ise, entegrenin çıkış empedansına doğru akımın deşarj olması gerektiğidir.
b) PNP Turn Off Devresi
Daha hızlı turn off yapabilmek için kullanılan en popüler yöntem ise PNP turn off devresidir.
Qoff transistörü ile, off zamanında mosfet için kısa yol sağlanmış olmaktadır. böylece gate direnci ile karşılaşmadan mosfet kapasitansı çok hızlı bi şekilde Qoff üzerinden deşarj olabilmektedir. Rgate yine turn on hızını belirlemektedir. Don ise, turn on akımı için yol sağlamaktadır ve ayrıca turn off akımının Rgate e gitmesini engellemektedir. Don ayrıca, Qoff u ters gerilime karşı korumaktadır.
Bu tekniğin en önemli avantajı, yüksek turn off peak akımlarını, Qoff transistörü üzerinden etkili ve hızlı biçimde deşarj etmektedir. entegrede harcanan toplam güçte yarıya düşecektir. Yani eskiden turn on ve turn off entegre içinde güç harcanıyordu fakat burada sadece turn on sırasında güç harcanacaktır. Bu devre aslında NPN transistörü diyotla değiştirilmiş olan totem pole tekniği gibidir. Totem pole daki gibi, bu teknikte, gate voltajını, Vdrv + 0.7V ile GND – 0.7V arasına sabitlemektedir.
c) NPN Turn Off Devresi
Qoff transistörü burada yine, gate voltajını mosfetin source ucundaki voltaja yakın tutmaktadır. Ayrıca entegreye enerji verildiği zaman, mosfetleri belli bi zamana kadar kapalı tutmaktadır. Fakat bu teknik, entegrenin çıkış sinyalinin tersini alarak kullandığı için, Qinv transistörüne ihtiyacı vardır. Mosfet on durumunda iken, Qinv transistörü akım çektiği için verimi de düşürecektir. Qinv transistörü saturasyona da uğradığı için, turn off zamanında gecikmeye yol açabilmektedir.
d) NMOS Turn Off Devresi
Eğer PWM entegresi veya driver entegresi birbirinin zıttı olan iki çıkış verebiliyorsa, aşağıdaki teknik kullanılabilmektedir. Bu teknik çok hızlı anahtarlama sağlamakla birlikte, gate kapasitansının da çok hızlı ve tamamen deşarj olmasını sağlamaktadır. Rgate yine burda turn on hızını belirlemektedir. Dezavantajı ise, iki tane mosfet kullanıldığı için ve toplam mosfet gate kapasitansıda arttığı için, entegrenin toplam vermesi gereken gate şarjı da artmaktadır. Yani total gate charge artmış olmaktadır. Bu şarjı da entegre sağlamak zorundadır.
Mosfet dv/dt Koruması
Mosfetlerde dv/dt korumasının önemli olduğu iki zaman vardır; biri turn on zamanı diğeri ise turn off zamanıdır. Turn on zamanındaki dv/dt oranı ise gate ile source arasına bağlanan direnç ile çözümlenirken, turn off zamanındaki dv/dt oranı ise, bildiğim kadarı ile senkron doğrultma kullanan anahtarlama çözümleri ile resonant converter lardır.
Gate – source arasına bağlanan direncin hesabı vardır fakat bu hesaplamada datasheetden öğrenemeyeceğimiz bazı gerekli parametreler olduğundan dolayı formülleri buraya koymanın bi anlamı olmadığını düşündüm. Fakat hiç koymamaktansa sıkça gördüğüm değerler olan 1k veya 10k direnç değerini gate – source arasına bağlamak şimdilik turn on dv/dt oranını düşürmekte yeterli olabilir. Bu değerlerden bazıları Rgi dediğimiz internal gate direnci yani gate in iç direncidir. Bu da kapasitörlerin ESR değerini ölçmek için kullanılan teknikle ölçülebilmektedir.
Bootstrap Tekniği
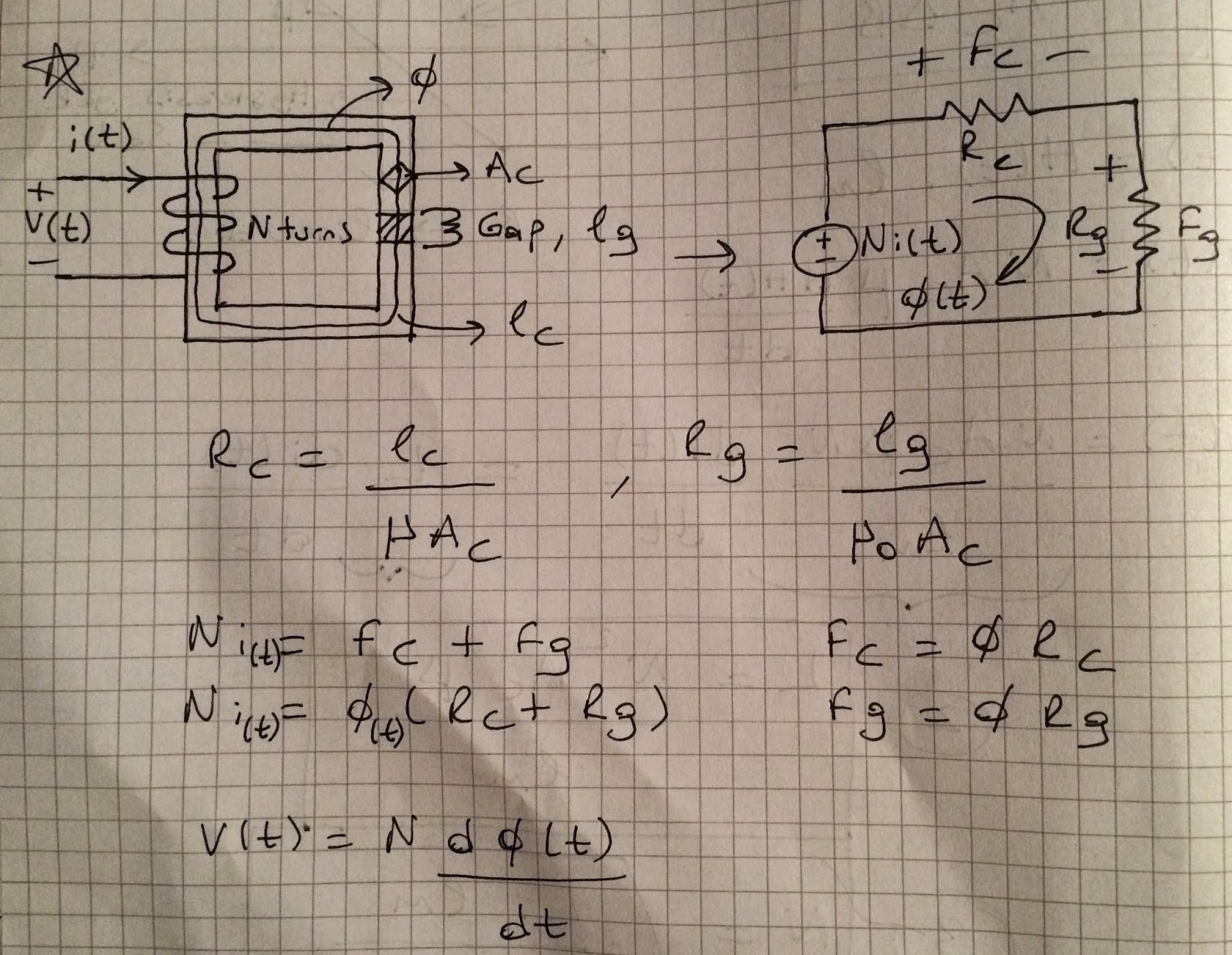
N kanala sahip mosfetleri high side da yani source bacağı floating olan (devrenin referans noktasına ulaşamayan) mosfetlerde, açıp kapama işlemini gerçekleştirebilmek için, gate voltajı her zaman source bacağına göre verilmelidir. Çünkü gate voltajının referans noktası her zaman mosfetin source bacağıdır. Mosfetin source bacağı ise half bridge, full bridge gibi topolojilerde çok yüksek voltaj değerlerine ulaşabildiği için gate voltajı da her zaman source bacağının bu yüksek voltajına göre verilmelidir. Yani örneğin, source bacağı 200V ise, gate voltajı 210V olmalıdır ki, VGS voltajı o zaman 210V – 200V = 10V olabilsin. Voltajlar çok yüksek değerlere çıkabildiğinden dolayı, high side mosfet sürme teknikleri dikkatli dizayn edilmelidir.
Mosfetleri sürmenin, özellikle high side mosfetleri sürmenin diğer bi yolu ise bootstrap tekniğini kullanan driver entegreleri kullanmaktır. Bu entegreler bootstrap kapasitörünü şarj için kullanarak, gate voltajının source voltajından her zaman bootstrap kapasitöründeki voltaj kadar fazla olmasını sağlar. Bu sayede mosfet ve igbt anahtarlaması yapılabilir.

C4 ve C3, VDD beslemesi ile ilgilidir. C4 transient gerilimleri önler, C3 ise beslemenin daha pürüzsüz DC olmasına yardımcı olur. D1, C1 ve C2 bootstrap kapasitörlerini VCC üzerinden, Q2 transistörü her on olduğu zaman, şarj olmasını sağlar. Dikkat ederseniz bootstrap kapasitörleri sadece ve sadece Q2 transistörü on olduğu zaman uçlarına +12V uygulanmaktadır. Bu sayede de şarj olabilmektedir. Şarj olan bu kapasitörlerin voltajı, Q1 i açmak için yani on yapabilmek için kullanılır. Q1 her on olacağı zaman source voltajına bu kapasitörlerdeki voltaj eklenir, böylece gate voltajı her zaman sourcedan kapasitör voltajı kadar fazla olmuş olur. Q1 in source bacağı floating node dur, yani toprağa göre referans alınamayan bir noktadır. Mosfeti on yapabilmek için Vgs voltajı uygulamanız gerekmektedir fakat bu voltaj her zaman mosfetin source bacağına göre + voltaj olmalıdır. Q2 nin source bacağı, besleme ile aynı referans noktasını paylaştığı için Q2 mosfet driver olmadan bile on yapılabilir. Fakat Q1 i on yapmanın iki yolu vardır, biri ir2110 gibi mosfet driver kullanmak diğeri ise gate drive transformer kullanmaktır. Mosfet driver da bootstrap kapasitör voltajı mosfeti aktif hale getirmek için kullanılırken, trafo da direk izolasyon sağlandığı için her hangi bi + voltaj ile mosfet kolayca aktif hale getirilebilir.
Bootstrap kapasitörü olarak tek tantal kapasitör yada bir elektrolitik bir seramik kapasitör kullanabilirsiniz. Şemada elektrolitik ve seramik kullanılmıştır. Bootstrap kapasitörünün değeri bildiğim kadarı ile çok önemli değil. Sadece çok büyük yada çok küçük değerde seçmemek gerekiyor. İnternette gördüğüm kadarı ile 30 ile 50kHz arasında 4.7uF ile 22uF arasında değişiyor. Frekans artıkça, kapasitörün değeri de düşmektedir.
İnternette gördüğüm ve denemediğim web tabanlı hesabı da kullanabilirsiniz.
http://www.silabs.com/support/Pages/bootstrap-calculator.aspx
R3 ve R4 e paralel bi schottky diyot ekleyebilirsiniz. Bu diyotlar ve bunlara paralel dirençler yanlış tetiklemeyi önlemektedir. Gate direncine paralel diyot ise, mosfetin daha hızlı deşarj olmasını sağlamaktadır.
Mosfet driverları şemadaki gibi floating node olan durumlarda, h-bridge gibi devrelerde kullanılmaktadır.
Tekniğin dezavantajlarını anlatacak olursak, high side mosfetin ve mosfetin source bacağına bağlı VS pinindeki negatif voltaj sıçramaları ile karşılaşılabilir. Bu negatif voltajlar, parazitik endüktans ile turn off hızına, di/dt oranı ile doğru orantılı olarak artmaktadır. Bu voltajlar, entegrenin çıkışı için sorun teşkil edebilmektedir. Şöyle ki, negatif voltaj sıçramaları, driver entegresindeki herhangi bir noktayı, referans noktası olan ground dan aşağı çekebilmektedir. Ayrıca, bootstrap kapasitöründeki voltajda negatif voltaj sıçramasından dolayı artabilmektedir buda entegreye ve mosfet gate ine zarar verebilir. Önlemek için bootstrap kapasitörüne seri direnç eklenebilir fakat buda bootstrap kapasitörünün şarj – deşarj hızını düşerecektir.

Negatif voltaj sıçramalarından korunmak için, yukardaki resimdeki gibi SRC (VS) pini ile GND arasına schottky diyot bağlanmalıdır. Schottky diyotun anot tarafı entegrenin referans noktasında olmalıdır. Bu devrede ise, Rgate direnci hem turn on hem turn off hızını belirlemektedir ve ayrıca ters, negatif voltaj sıçramaları olduğu durumda, schottky diyottan geçicek akımı da sınırlamaktadır. Bununla birlikte, bootstrap kapasitöründeki voltajda sabit kalacaktır. Bu devrenin tek dezavantajı ise, bootstrap kapasitöründeki şarj, Rgate üzerinden deşarj olmalıdır ki bu da Cbst ve Rgate in yer aldığı time constant dediğimiz şarj deşarj süresini belirleyen bir faktördür ve duty cycle ın 1 e yaklaştığı durumlarda sorun çıkartabilir.
Boostrap kapasitör denklemi yine datasheetden öğrenemeyeceğimiz parametreleri içerdiğinden buraya koymayı uygun görmedim.
AC Coupled Gate Drive Tekniği
Bu devrede, gate sinyali üzerinde bir takım değişiklikler yapılır. Bu değişiklik level shift olarak adlandırılır. Tekniğin asıl amacı, turn on ve turn off gate voltajlarını AC coupling kapasitörü ile değiştirmektir.

Yukardaki gibi AC coupled gate drive devresinde, gate Vdrv – Vcl ile -Vcl arasında bi voltajla sürülecektir. Vcl voltajı ise iki diyot tarafından belirlenmektedir. Bu tekniğin avantajı ise, turn off sırasında gate ucuna negatif polarlama vererek, gate kapasitansının daha hızlı deşarj olmasını sağlayabilmektedir. Böylece turn off hızını artırabilmektedir. AC coupling devresinin ana bileşenleri ise, Cc kapasitörü ile Rgs direncidir. Rgs direnci, enerjinin ilk verildiği sırada gate i source bacağına çekmektedir. Rgs direnci ayrıca, Cc kapasitörü için bir akım yolu sağlamaktadır. Rgs direnci olmadan, Cc kapasitörü uçlarında voltaj oluşmayacaktır. Teorik olarakta, her anahtarlama sırasında, kapasitöre aktarılan ve kapasitörden alınan gate charge (gate yükü, şarjı) aynı olacağından, net yük 0 olacaktır.

Cc kapasitörü ise yukardaki denkleme göre hesaplanmalıdır. Burda Qg mosfetin gate kapasitansıdır. fdrv ise o çıkışın frekansıdır. D ise max duty cycle dır. Burdaki t gibi olan şey tao dur yani RC zaman sabitidir ve Cc kapasitörünün şarj – deşarj süresidir. Enerji ilk verildiği sırada, Cc kapasitöründeki voltaj sıfırdır. Entegreye nerji ilk geldiği zaman, entegre çıkışı PWM vermeye başlayacaktır ve Cc üzerinde son değerine ulaşıncaya kadar voltaj oluşmaya başlayacaktır. Bu voltajın oluşma zamanı, zaman sabiti olan RC ye göre yani Rgs ve Cc değerlerine göre belirlenmektedir. Burdaki zaman sabiti anladığım kadarı ile kullanıcıya kalmış bir değerdir. Burda Cc kapasitörü üzerindeki ripple voltaj genliği Vdrv voltajının %10 u olarak alınmış ve ayrıca duty cycle da en kötü durum için 0.5 olarak denkleme konulmuştur.
Kimi kaynaklar Cc kapasitörünün mosfetin gate source kapasitansı olan Ciss kapasitansından en düşük 10 katı olarak alınması gerektiği yazmaktadır.
Transformer Coupled Gate Drive Teknikleri
Transformatör içeren gate drive teknikleri, sürücü entegrelerinin olmadığı zamanlarda tek çözümdü. Sürücü entegrelerinin dezavantajlarından biri olan turn on ve turn off gecikmeleri, gate drive trafosu içeren devrelerde yoksayılacak düzeydedir. Fakat gate drive trafoları, daha fazla yer kaplayabilirler ve ayrıca nasıl çalıştıkları iyi irdelenerek dizayn edilmelidirler. Gate drive trafolarının özellikleri ise;
- En az iki sarımlı olmalıdırlar. Bu iki sarım izolasyonu sağlamaktadır. Sarım sayıları oranı ile gate voltajı artırıp azaltılabilir fakat genelde gerekmemektedir.
- İdeal olarak bu trafolarda enerji saklanmamaktadır. Fakat, realistik olarak düşünecek olursak, nüvelerin birleşim yerlerinde çok küçük miktarda boşluk olabileceğinden dolayı, küçük miktarda enerji saklanabilmektedir. Bu enerji, sızıntı ve mıknatıslanma endüktansında yer almaktadır. Sızıntı endüktansını azaltmak verimliliği artırmak için önemlidir. Gate drive trafosu çok küçük güçte olmaktadır fakat yüksek turn on ve turn off peak akımlarını aktarabilmektedir. Turn on veya turn off gecikmelerini önlemek için sızıntı endüktansları minimuma indirilmelidir.
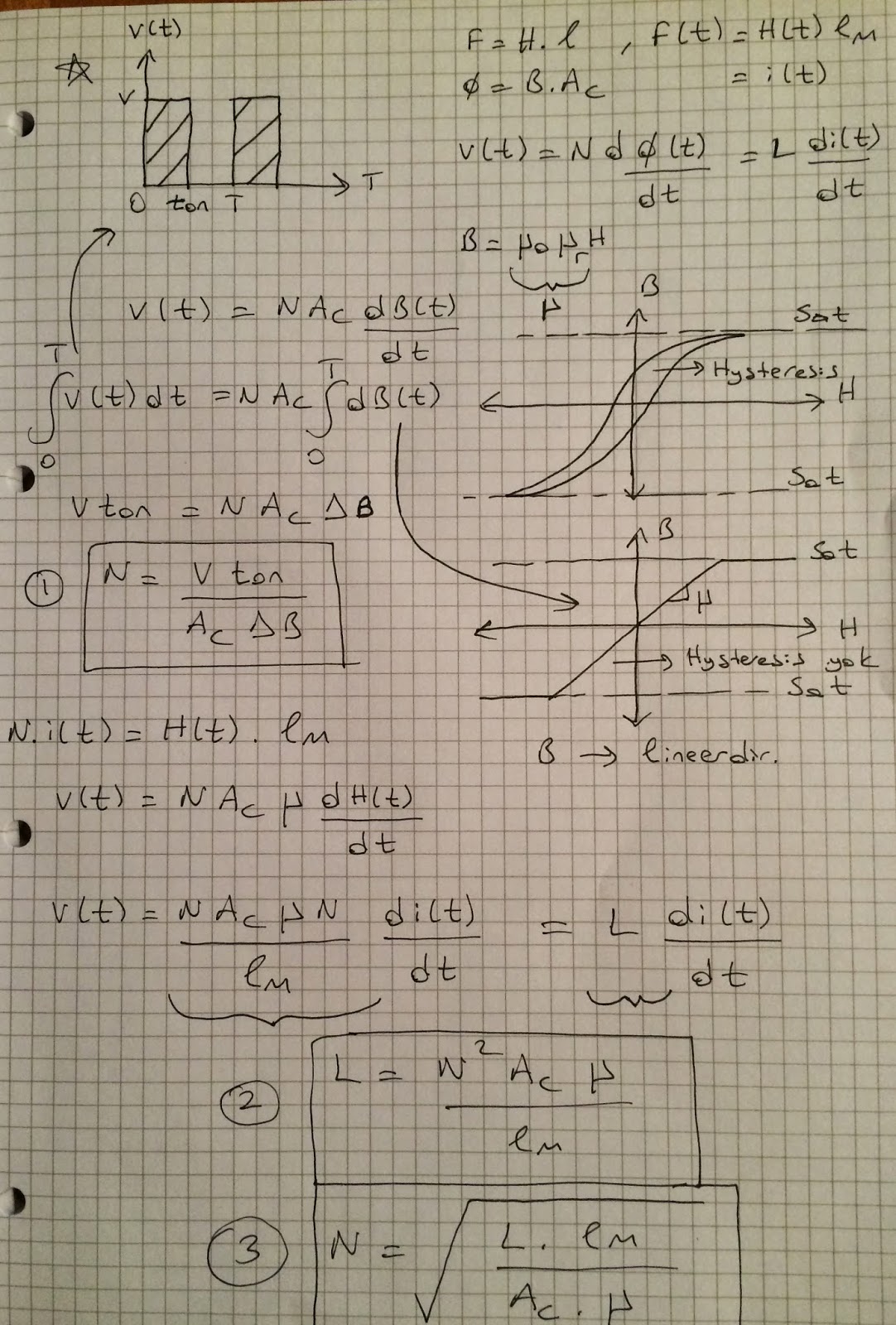
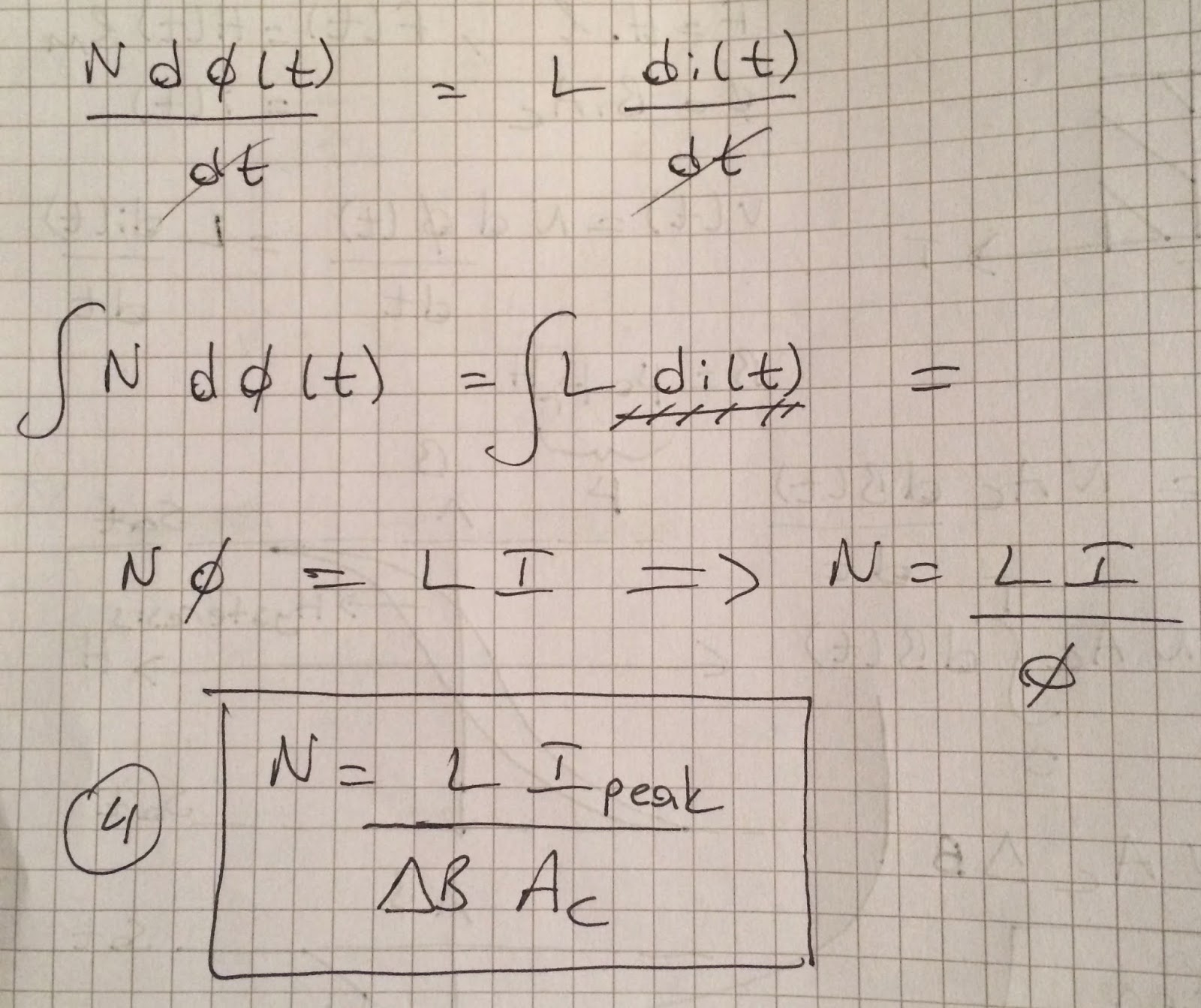
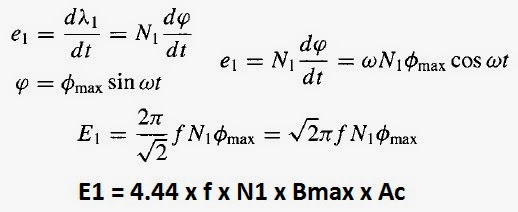
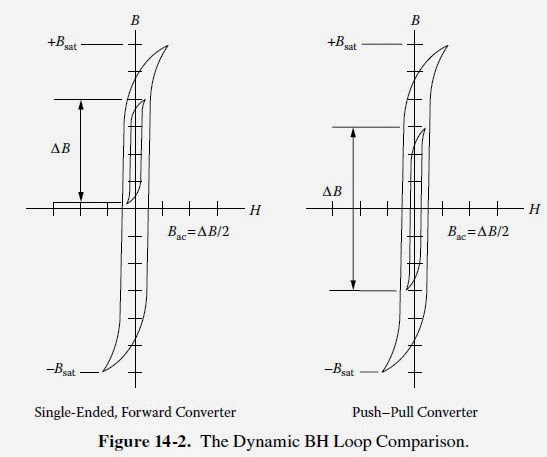
- Trafoda enerji saklanmayacağı için, her periyot sonunda, sarımların üstündeki ortalama voltaj 0 olmalıdır. Aksi takdirde oluşacak herhangi bir DC değer, nüve içindeki akının artmasına, nüvenin saturasyona gitmesine sebeb olacaktır. Daha önce hatırlarsanız, nüvede sadece Bac akısı vardır fakat DC değer olursa bu Bdc + Bac olur ki buda Bmax eskiden Bac iken, artık Bmax = Bac + Bdc olacağından nüvenin saturasyona girmesi kaçınılmaz olacaktır.
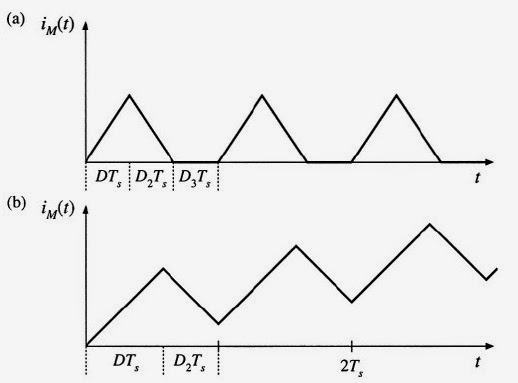
- Diğer bi konu ise, ana güç trafosunda, B-H döngüsünün yukarısını kullanan forward converter gibi topolojilerde, anahtarlama periyodunun önemli bir kısmı mıknatıslanma akımını resetlemek için saklanmalıdır, kullanılmalıdır. Aksi takdirde, mıknatıslanma akımı sıfırlanmayacağından, nüvedeki mıknatıslanma akımı sürekli artıp, nüve saturasyona gidecektir. İşte bu da max duty cycle ı limitleyen bir faktördür. Nadirende olsa, single ended gate drive trafolarında da sorun olabilmektedir çünkü çift yönlü mıknatıslanmayı desteklemek zorunda oldukları için, AC coupled şeklinde dizayn edilmeleri gerekmektedir. Çift yönlü mıknatıslanma, gate drive trafosundaki mıknatıslanma akımını sıfırlamak ve gate drive trafo nüvesini saturasyona girmesini engellemek içindir.
a) Single Ended Transformer Coupled Gate Drive Tekniği
Bu tür gate drive trafolu devrelerle, tek çıkışa sahip entegreler kullanılarak, high side mosfetler sürülebilmektedir.
Cc coupling kapasitörü, gate drive trafosundaki mıknatıslanma akımını sıfıra çekebilmek için, gate drive trafosuna seri olarak bağlanmalıdır. Cc kapasitörü olmadığı zaman ise, duty cycle a bağlı olarak, sarımlarda DC voltaj oluşup nüveyi saturasyona sokacaktır. Daha önce dediğim gibi nüvenin enerji saklama özelliği olmadığından, herhangi bir DC değerde nüve direk olarak saturasyona gidecektir.
Cc değeri, AC coupled gate drive devresindeki denklemden hesaplanmaktadır. Cc kapasitörünün voltaj değeri ise, Vc = D x Vdrv olmaktadır. Burada D yine duty cycle dır. Duty cycle daki ani değişimler ise, LC rezonans devresi oluşmasına neden olacaktır. Buradaki L mıknatıslanma endüktansı olup, C ise Cc kapasitansıdır. Bu rezonans efekti, Rc direnci denkleme göre konularak, azaltılabilmektedir.
Buradaki, Lm ise yine gate drive trafosunun mıknatıslanma endüktansıdır. Rc ise aslında entegrenin çıkış empedansını da içeren bir değerdir. Buradaki rezonans etkisi, gate voltajında yükselmelere veya azalmalara yol açabilmektedir.
Entegre çıkışı low state yani off durumunda iken, normalde akım sağlayan değil akım alan durumda olmaktadır. Fakat mıknatıslanma akımı sebebiyle, entegre bu durumda, akımı yine destekleyecek bi yapıda olmaktadır, yani akım yine entegre çıkışından çıkıp, döngü içerisinde dolaşmak zorundadır. Buda, entegre çıkışının, gate drive trafolarıyla kullanılması durumunda, çift yönlü akımlara dayanıklı olması gerektiğini göstermektedir. Eğer desteklemiyorsa, ek diyotlara ihtiyaç duyulmaktadır. Bu diyotlar schottky diyot olup, entegre çıkışına katodu, ground (referans) noktasına anodu gelecek şekilde bağlanmalıdır.
Geniş duty cycle aralıklarında ise, yukardaki devre, yeterli miktarda gate voltajı sağlayamadığı durumlar olabilmektedir. Bunun nedeni ise artan duty cycle ile, Cc kapasitöründeki voltajın artmasıdır. Artan Vc voltajı ile, turn off için gerekli negative bias (polarlama) voltajı artıp, turn on voltajı da ters orantılı olarak azalmaktadır. Bunu önlemek için aşağıdaki geliştirilmiş bi versiyonu olan devre kullanılmaktadır.
Bu devrede ise, Cc2 ve Dc2 kapasitör ve diyotları, sekonderdeki gate voltaj genliğini düzenlemek için kullanılmıştır. Eğer daha fazla negatif bias voltajı gerekiyorsa, Dc2 diyotuna ters olarak zener diyot ilave edilebilmektedir. Bunun örneğini AC coupled gate drive devresinde görebilirsiniz.
Bu formülde ise, Qg yine mosfetin gate yükü, şarjı, Delta Vc2, C2 kapasitöründeki belirlenen voltaj ripple değeri, Vdc2,fw, dc2 diyotunun forward voltaj değeri, Dmax, max duty cycle dır. Tüm parametreler yukardaki denklemlerle aslında aynıdır.
Yukardaki denklemde ise, Delta Vc1 yine C1 kapasitörü üzerindeki voltaj ripple değeri, Lm gate drive trafosununun primerdeki mıknatıslanma endüktansı ve D de 0.6 ile 0.8 arasında alabileceğimiz duty cycle değeridir. Burda max Cc1 kapasitans değeri farklı duty cycle değerlerinde çıktığı için duty cycle ın 0.6 ile 0.8 arasında alınabileceği kaynakta belirtilmiştir.
Hiç formül hesaplamak istemiyorsanız, bazı kaynaklarda belirtilen Ciss kapasitansının en az 10 katı büyük kapasitans değerini Cc1 ve Cc2 için kullanabilirsiniz.
Single ended devrelerinde gate drive trafoları AC coupled olduğu için, mıknatıslanma endüktansı değişken duty cycle ı olan değişken genlikli PWM sinyalini görür fakat daha sonra anlatacağım double ended olan half bridge gibi topolojilerde, gate drive trafoları sabit genlikte değişken PWM sinyalini görmektedir. Fakat tüm durumlarda da, gate drive trafoları B-H döngüsünün hem yukarısında hem aşağısında çalışabilmelidirler.
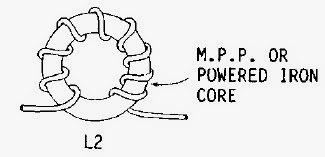
Gate drive trafolarının dizaynı ana trafonunkine benzemektedir. Sarım sayıları genelde 1:1 olmaktadır ve harcadıkları güç genelde yok sayılmaktadır. Sarımın basitliği açısından toroid nüve kullanılabilir. Fakat nüve materyali kesinlikle ferrite olmak zorundadır. Bu sayede mıknatıslanma endüktansını maksimum yapabilir, mıknatıslanma akımını minimuma indirebiliriz. Minimum mıknatıslanma akımıda, nüvedeki akıyı daha kolay sıfırlayabileceğimiz anlamına gelmektedir.
Tek tel ve sarım sayıları küçük olacağı için ve ayrıca çok düşük güçte bir trafo olacağından, göz kararı ufak bir nüve seçebilirsiniz. Büyük nüve de seçebilirsiniz bunun tek dezavantajı, fazla yer kaplaması olacaktır. Yukardaki denklemde Vtr, primer üzerindeki voltajdır. t ise max ton süresidir. Delta B ise peak to peak akı değişimidir. Ae ise seçtiğiniz nüvenin kesit alanıdır. Birimler ise V, us (mikro saniye), T (Tesla) ve mm^2 dir.

Burdaki grafikte volt-second çarpımının nasıl değiştiğini göstermektedir. Volt-second çarpımı ise, bi yukardaki formülde Vtr x t yazan kısımdır. Yani volt x saniye dir. Grafikte ise bu değerin normalize edilmiş yani max değeri 1 olacak şekilde çizilmiştir. Sol tarafa bakarsanız volt-second çarpımının, Vdrv x Tdrv a bölünmüştür. Tdrv burada periyottur. Delta B olarak 0.18T ile 0.25T arasında alabilirsiniz fakat nüve içindeki Delta B nin ne olacağını aslında kestirmek epey zordur çünkü bu kontrol döngüsünün hızına ve coupling devresinin zaman sabitine bağlı olmaktadır. Grafikte bulduğunuz normalize edilmiş volt-second çarpımını Vdrv x Tdrv ile çarpmanız gerekmektedir, böylece Vtr x t parametresini bulup formülde yerine koyabilirsiniz.
Daha önce belirttiğim gibi, gecikme olmasını engelleme için yada minimuma indirmek için, kaçak, sızıntı endüktansı olabildiğince az olmalıdır. Genelde bu tür gate drive trafolarında izolasyon sadece emaye bobin telinin kendi izolasyonu ile sağlanır fakat ekstradan iki sarım arasına izolasyon uygulamanızın biraz daha büyük nüve seçmek dışında dezavantaj yaratacak bir tarafı yoktur. Toroid nüvelerde, sarımlar birbirine olduğunca yakın olmalıdır, bifilar ve trifilar sarım teknikleri kullanılabilir. Bu tamamen sekonderde kaç çıkışın olduğuna bağlıdır. Diğer nüvelerde ise, yine sarımlar birbirine olabildiğince yakın olmalıdır. Toroid harici nüvelerde, primer merkeze en yakın, sekonder hemen arkasında olmalıdır, eğer half bridge gibi low ve high side sarımları olacaksa, high side sarımı merkezden yani primer sarımından en uzakta olmalıdır.
b) Double Ended Transformer Coupled Gate Drive Tekniği
Half – bridge ve full – bridge gibi floating noktası barındıran topolojilerde mosfetleri sürebilmek için double ended gate trafosu dediğimiz çift sekonder çıkışlı gate drive trafoları kullanılabilmektedir.
Yukardaki devrede ise, OUTA çıkışı, ilk cycle da primer sarımına positif voltaj vermektedir. Diğer cycle da ise OUTB çıkışı, primerde bu sefer tam tersi voltaj oluşacak şekilde çıkış vermektedir. Eğer bu iki cycle da, yani bir periyot boyunca, primere gelen voltajın ortalama, DC değerini alırsak bu değerin sıfır olduğu görülür. Çünkü, her cycle boyunca birbirine ters voltajlar primerde indükleneceği için herhangi bir DC voltaj primerde oluşmayacaktır. Bu yüzden, bu tür gate drive trafolarının nüvelerinde DC voltaj oluşmadığı için DC akı da oluşmadığı gibi AC coupling kapasitörü kullanımı da ortadan kalkmaktadır.
Fakat her cycle daki primere gelen voltaj, primerde indüklenen voltaj eşit olmadığı durumda, primer sarımlarında DC voltaj oluşabilir fakat bu durum, driver entegresinin çıkış empedansları sayesinde kompanzasyonu yapılabilmektedir. Eğer daha garanti olsun derseniz yukardaki gate drive trafolarındaki gibi, primere seri Cc kapasitörü bağlayabilirsiniz.
Bu devrede ise phase shift full bridge devresinin nasıl sürülebileceğini göstermektedir. Yine PNP turn off devresi ve diğer 2 sekonder çıkışlı gate drive trafosu resimdeki gibi eklenmiştir.